Cette page a pour but de présenter les avantages du BBT (Block-Brake-Timer) dans Rocrail. Elle se décompose en 2 parties. Une première partie qui présente différents scénarios de détection et automatisation sans le BBT. Et la seconde partie qui aborde la détection/automatisation avec le BBT. Les informations peuvent également être recoupées avec une autre page du site traitant de la mise en application de l’automatisation l’un de nos réseaux.
BBT : La tâche du BBT est de s’assurer que les locomotives / trains arrivent aussi précisément que possible à la vitesse V_min au détecteur IN. La locomotive freine en un nombre prédéterminé d’étapes entre ENTER et IN, car Rocrail envoie des commandes de vitesse décroissante à la locomotive à intervalles réguliers. Si la locomotive arrive au détecteur IN après une tentative à une vitesse supérieure à V_min, Rocrail calcule une séquence de pas plus rapide et l’essaie lors de la prochaine tentative. Si la locomotive est à V_min, bien avant qu’elle n’arrive au détecteur IN (et qu’elle rampe maintenant vers le détecteur IN), alors Rocrail calcule une séquence d’étapes plus lente. À chaque itération, la séquence devient plus précise pour finalement atteindre le détecteur IN avec une précision point à point de V_min. Dans les cas où le réglage des différents pas de vitesse entre ENTER et IN est visuellement reconnaissable (i.e. secousses de la locomotive), vous avez la possibilité de configurer Rocrail de manière à ce que plus de pas puissent être utilisés.
Source : Traduit du Wiki Rocrail en Anglais
L’utilisation du BBT est optimal pour tous les blocs visibles dans lesquels les trains doivent toujours s’arrêter (« attente » est activé) et ce de façon précise. Dans les autres cas, la locomotive ralentira en fonction du réglage du CV4 du décodeur.
Source : Traduit du Wiki Rocrail en Anglais
Scénarios sans BBT
Circulation à sens unique
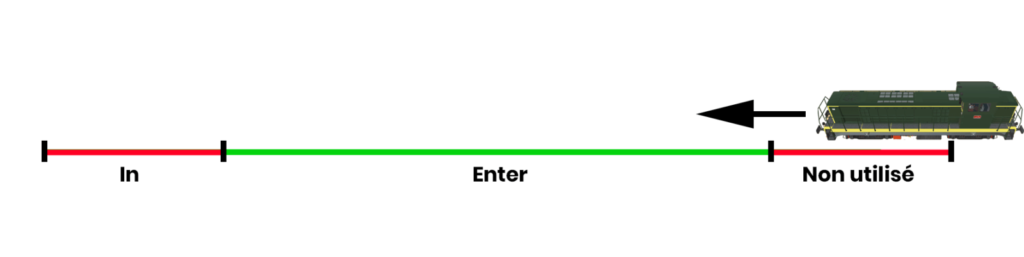
Cette configuration peut-être utilisée dans le cadre d’une circulation à sens unique. L’ensemble de la zone (enter + in) devra être au moins aussi longue que la rame la plus longue du réseau. Ici la machine va commencer à ralentir (utilisation de la courbe de vitesse de la machine) en entrant dans le bloc et s’arrêter sur la zone rouge.
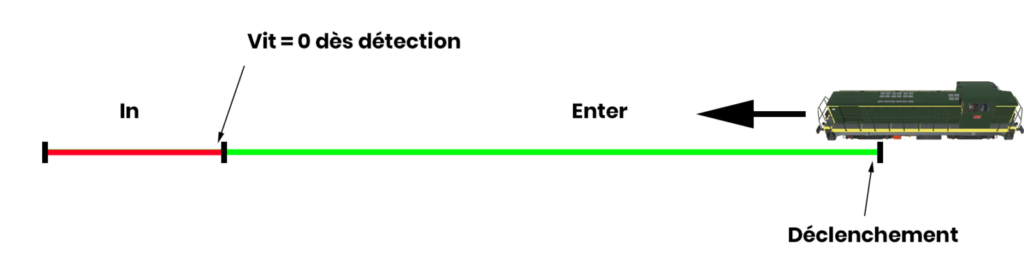
Pour la longueur de la zone « in », on pourra partir sur une longueur d’une cinquantaine de centimètres. Pour la zone pas de restriction de longueur du moment qu’elle soit au minimum aussi longue que la plus grande rame du réseau.
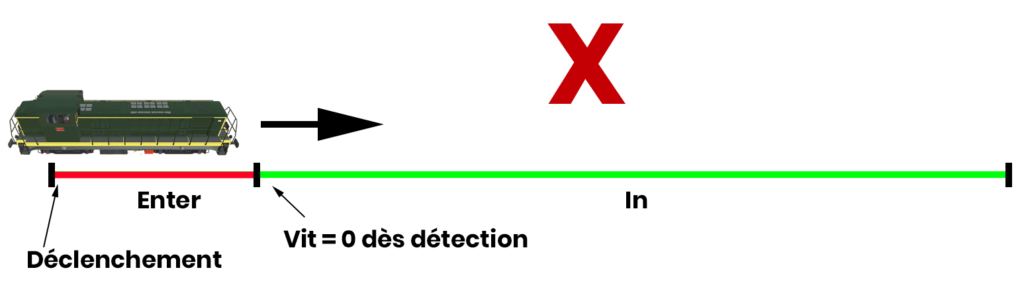
Cette configuration est adaptée à une circulation en sens unique. Si une machine devait arriver dans l’autre sens (exemple ci-dessous), la zone de ralentissement (en rouge ici) serait beaucoup trop courte et la machine s’arrêterait sur déclenchement de la zone verte. Il en résulterait un arrêt plus ou moins au début du bloc et non en fin de bloc.
Circulations à double sens (voie à sens unique)
Pour une gestion avec circulation du bloc dans les 2 sens, il faut alors réserver 3 capteurs.
Dans un sens :
Ou dans l’autre :
Cette configuration va être adaptée pour de la pleine voie principalement. La machine ralenti sur la zone verte et s’arrête sur la zone rouge, devant un signal par exemple.
Circulations à double sens (alternative)
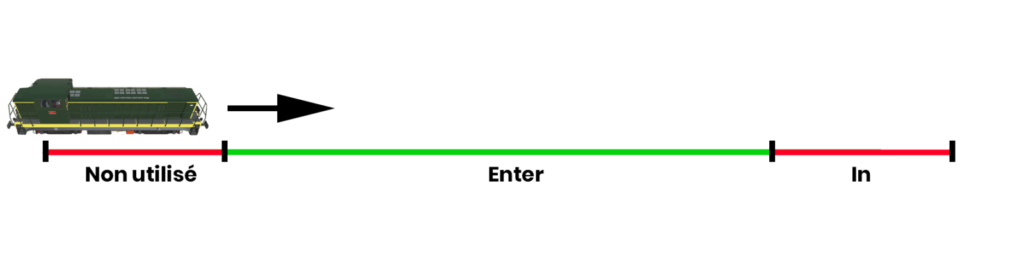
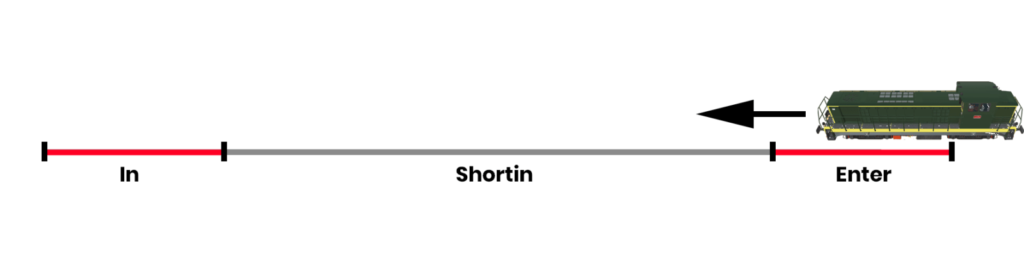
Dans cette alternative, on utilisera toujours 3 capteurs pour gérer la circulation dans les 2 sens. Mais le capteur au centre sera de type « short2in ». On aura donc comme précédemment :
- La séquence « enter »+« in » avec arrêt sur le capteur « in ». Et ce dans les 2 sens.
- Et une autre séquence « enter »+« short2in » qui permettra d’arrêter la machine au centre (dans les 2 sens).
Cette configuration est adaptée aux voies en gare ou un autorail (longueur courte) pourra s’arrêter au centre de la gare et non tout au bout (sur le « in »). Et les autres machines en fin de bloc. Cette configuration annonce les prémices de l’utilisation du BBT par hasard 😜
Dans un sens :
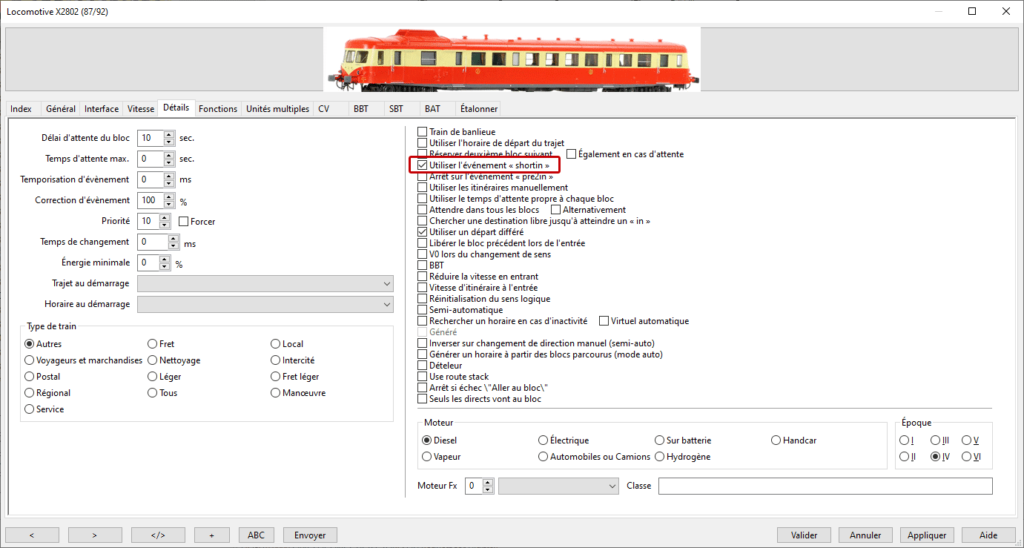
Pour les machines qui devront s’arrêter au centre. « Utiliser l’événement shortin » devra être coché dans les paramètres de la machine.
Utilisation du BBT
Résumé des scénarios précédents sans BBT :
Si l’on est sûr que le réseau restera en sens unique, l’on voit que l’on va consommer 2 capteurs par bloc. Si l’on circule en double sens, alors chaque bloc consommera 3 capteurs.
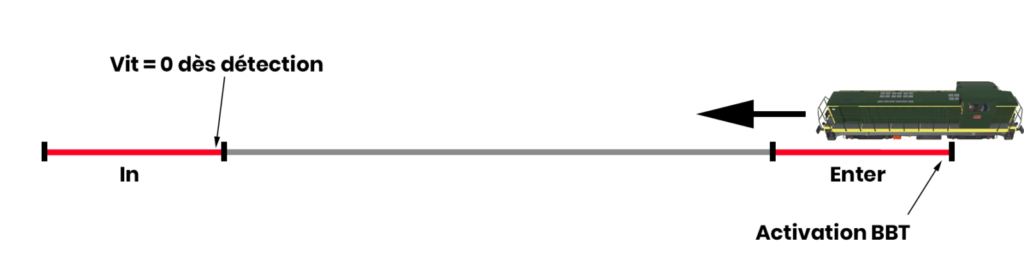
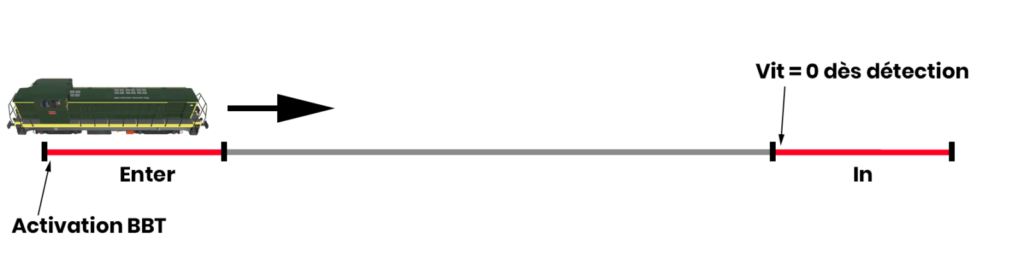
Le BBT change la donne car il consommera 2 capteurs pour gérer le double sens au lieu de 3. La machine freinera (enclenchement de la phase BBT) dès lors qu’elle rentrera en contact avec le capteur « enter ». Elle s’arrêtera dans la zone « morte » (entre les 2 capteurs) et après apprentissages successifs de manière automatique. Si elle dépasse la zone morte (= elle ne s’est pas arrêtée complètement), alors sa vitesse est mise à 0 au contact du capteur « In ».
De plus l’arrêt pourra se faire au centre, machine avant, machine arrière dans la zone morte.
Dans un sens :
Ou dans l’autre :
Conclusion
Si l’on a câblé son réseau comme dans le premier scénario et que l’on circule forcément en sens unique. Il n’y a pas obligation de modifier son sectionnement de voie et le BBT va aussi pouvoir être employé.
En revanche vu que le BBT va permettre d’économiser un capteur et de gérer le double sens. Cela est donc idéal de l’activer et de s’en servir. En terme d’évolutivité c’est l’idéal et surtout que l’arrêt de la machine peut se paramétrer plus simplement au centre de la zone morte, à l’avant ou vers l’arrière du bloc.
Les différents tests ont permis également de définir longueur idéale de la zone de détection « in » de 15-20cm (HO).